REIT RT15A 全自動コンクリートブロック生産ライン
| パレットサイズ | 1400 ×1150×16mm(スチール) |
|---|---|
| 容量/パレットあたり | 15 中空ブロック400×200×200mm |
| 機械の寸法 | 7800×2800×3600(4000)んん |
| オペレーションサイクル | 15-30s (製品によって異なります) |
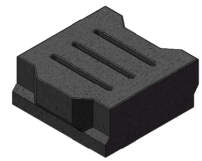
1.製品仕様
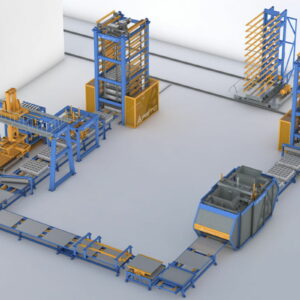
ブロック マシンには 3 つの主要な部分が含まれています, 基礎コンクリート注入装置を含む, 切羽コンクリート供給装置および締固めシステム. REIT QFT15の第4版について, 下地コンクリート送り装置と面コンクリート送り装置は独立して移動可能, 機械の調整と修理を簡単にするため. この改善により、作業員が操作できるスペースが増えました, 機械のメンテナンスと調整. フェイスミックスの有無にかかわらず、敷石の製造に広く使用できます。, カーブストーン, 中空ブロックおよび同様の要素.
Pos.1 緑のブロック コンベア
緑のブロックが入ったパレットをチェーンエレベーターに整然と運ぶために使用されます. 内部に搬送装置とクロールコンベヤを搭載.
内部の搬送装置は平行4ロッド構造で、シリンダー駆動です。, そのため、より安定して動作します.
クロールコンベヤーは、固定バケットと可動フレームと組み合わされています. 可動フレームは、1サイクルで1ピッチ水平にパレットを動かすことができます. ギアとラック機構を備えたフレームの動きは、周波数コントローラーによって制御される電気モーターによって駆動されます. 開始位置と停止位置は、高感度スイッチによって制御されます. 運動の終わりに, 製品の品質を確保するための強制的な機械の制限と保護装置があります.
主なパラメータ:
距離転送装置が動く: 120んん
ドリブンモーター: 4kw
輸送速度: 0.20—0.48m/秒
Pos.2 緑ブロックの回転ブラシ
生鮮品の洗浄用です. ブラシ本体は高強度旋回ナイロンブラシ, 鉄骨で支えられています. ブラシの高さは製品の高さに合わせて調整可能. 減速モーターとチェーンで駆動します。.
主なパラメータ:
- ドリブンモーター: 0.75kw
- ねじ寸法: 0.4-0.5んん
- 旋回速度: 137rpm
Pos.3 チェーンエレベーター 12 レイヤー
緑色のブロックを載せたパレットを所定の位置まで持ち上げ、設計された距離と段数で保管するためのものです。. いっぱいになったとき, 緑のブロックが付いたパレットは、フィンガーカーで硬化窯に移されます. そのフレームは、2つの横方向の安全グリッドを備えた断面鋼設計です. 支持角度はブッシュローラーチェーンに固定されています.
吊り上げおよび保管装置は、スチールフックで形成されています. チェーンは逆同期して動作しているため、持ち上げたり停止したりするとパレットが水平になります. 両側のチェーンは着実に機能します.
REIT が特許を取得した電気モーターで駆動する同期速度トランスミッションは、チェーンの持ち上げを同期的に確実にするために装備されています。. シンクロ変速機には、停電時の危険から守るオートロック機能を搭載.
高品質の近接センサーコントローラーの持ち上げ高さ, ビームセンサーと近接センサーコントローラーの組み合わせ二重保護装置による機器の動作と安全保護.
主なパラメータ:
ドリブンモーター: 11kw 走行速度: 0.1MS
ステージ番号。: 12 ステージごとのパレット: 2
ステージ距離 :400んん
Pos.4フィンガーカー 12 レイヤー

これは、チェーンエレベータから硬化ラックまたはチャンバーへの緑色のブロックを備えたパレットの輸送、および硬化製品をチェーンロワレータに戻すために使用されます。. フィンガーカーアセンブリはフィンガーカーで構成されています, プラットフォームカーと制御システム.
フィンガーカー
フィンガーカーはベースフレームで構成されています, 静止サポート, フィンガーリフト, 油圧ステーション, ドリブンデバイスとスレッドデバイス. 機能は、ブロック付きのパレットを持ち上げて輸送することです.
スチール製のベース フレームは、車輪付きの 2 シフトで固定されています (1つは運転しており、もう1つは運転されています) 周波数制御されたモーターによって駆動されます. 固定サポートは長方形のスチール製で、フィンガーリフトの動きをサポートおよびガイドするためにベースフレームに固定されています. がある 12 フィンガーリフトでのフィンガーフォークの皮むき. フィンガーリフトのガイドは 4 固定サポートに固定され、油圧シリンダーによって駆動される車輪のグループ. 適合ケーブル長について, 同期ワーリングローラー装置が使用されています (ローラーの要素を含む, ローラーの駅, 伸縮装置, およびケーブルに挟まれたデバイス, 等) フィンガーカーと同期してケーブルの伸縮を確保するため. この仕組みにより、電源や制御信号を安定して入出力することができます。.
主なパラメータ:
原動力: 11kw
移動速度: 0.1-1.2MS
層の距離: 400んん
レイヤー: 12
段ごとのパレット: 2
油圧ポンプ力: 4kw
油圧システムの使用圧力: 8mpa
プラットホーム車:
プラットホーム車は鋼鉄によって運ばれるプラットホームです, エレベーターの場所の間を移動するフィンガーカーを運ぶために使用されます, 養生窯とロワーレーター.
プラットフォームで溶接された頑丈な鉄骨フレームには、下に 2 つのシフトと大きなフランジ付きホイールが装備されており、周波数制御モーターによって駆動されます。. プラットフォームにはレールと安全装置があります. 電子位置決めを除いて、機械的位置決めとロック装置があります (REITが特許を取得している) 特定の場所でプラットフォームの位置を決め、フィンガーカーがスムーズかつ正確にバウンドせずに移動できるようにロックします.
主なパラメータ:
ドリブンモーター: 15kw
移動速度: 0.1-1.1MS
機械的位置決めおよびロック装置のモーター: 2.2kw
Pos.5 チェーンロワレーター付き 12 レイヤー
チェーン ロワーターは、硬化したブロックを含むパレットの取り出しと保管に使用されます。, キュービングとパレットの返却とリサイクルのためにコンベアに積み込まれます.
その技術データはチェーン エレベーターと同じです, 硬化物を載せたパレットを降ろします.
Pos.6 噴霧装置 (水噴霧装置)

このデバイスは、主に目的のために設計されています:
1. ドライブロックの梱包時や空パレットの清掃時の発塵を防止.
2. 最終ブロックの内部に水分を保持して、特定の硬度に達するまで硬化させます.
Pos.7 ドライブロックコンベア
硬化物が入ったパレットの取り出しに使用, 2つのパレットを分離し、それらをキュービングデバイスとパレットブラシに転送します, 次に、洗浄されたパレットをパレット回転装置に搬送します.
固定バケットと可動フレームの組み合わせ, 可動フレームは、パレットを 1 サイクルで 1 ピッチ水平に移動できます。. フレームの動きは、ラックとピニオン装置を介してモーターによって駆動されます. 開始位置と停止位置は、高感度スイッチによって制御されます. ドライブロックコンベヤの先頭にパレット用の分離装置があります.
主なパラメータ:
ドリブンモーター: 5.5kw
輸送速度: 0.42MS
Pos.8 自動キュービングプラント

硬化物をパレットからスラットコンベヤ上の製品パレットに積み上げる際に、自動キューバーの機能が使用されます。. 異なるブロックによると, レイヤー, 高さと立方体のスタイルを調整できます. キューバーは移動可能, 自動的にリフトと周回を同時に行う.
キューバーはフレームで構成されています, 移動カート, 持ち上げ装置, ワーリング装置とクランプ. キューバーのフレームはブリッジ型で、上部に移動台車のレールがあります. 移動カートは、クランクとロッカー機構を介してサーボモーターによって駆動され、レールに沿って移動します, 生産の必要性を満たすことができる. クランプが固定されている持ち上げ装置は 2 強い鉄骨柱 4 V型ガイドレールで、油圧シリンダーで上下駆動. ワーリング装置はモーターで駆動され、クランプを回転させます 90 左右別々に角度. クランプは 2 つのペアが交差して配置されています, 一人はメイン、もう一人はアシスタント. それらは同期機構を備えたシリンダーによって駆動されます. キューバーの上部には、安全グリッドを備えたメンテナンス プラットフォームがあります。.
油圧駆動ユニット
独立した油圧ステーションはオイルタンクで構成されています, バルブ, シリンダー, 冷暖房装置, フィルターとパイプライン. エレメントとシリンダーは、アメリカのウラヌスやユケンブランドなど世界的に有名な会社の高品質な製品ですので、ステーションは確実に作動します。.
電子制御システム
水平移動位置, 旋回角度と持ち上げ高さはデジタルエンコードで制御. システムに保護装置があります.
主なパラメータ:
キューブ有効高さ 50~1200mm
メインクランプの範囲; 840-1400んん
アシスタントクランプの範囲: 940-1400んん
クランプヘッドのもつれ: ±90°
吊り上げ能力: 650kg
水平移動の駆動力: 5kw (サーボ)
革命の原動力: 0.75kw
油圧ポンプのモーター: 22kw
油圧システムの圧力: 16mpa
Pos.9 パレットクリーニングブラシ

パレットを洗浄する回転ブラシです。. ブラシは高強度ナイロンブラシ, 鉄骨で支えられています. ブラシの高さ調節可能. チェーンを介してモーターで駆動されます.
主なパラメータ:
原動力: 0.75kw
Pos.10 パレット回転装置
低速回転モーターで駆動される空のパレットと洗浄済みのパレットを回転させるために使用されます。. デバイスは限定されたスイッチによって制御されます, 近接センサー, 安全保護としてビームセンサーを装備.
主なパラメータ:
原動力: 0.75kw
Pos.11 パレットクロストランスファー装置
空パレットを反転装置に搬送し、反転したパレットをパレットホッパーに移載するためのものです。. 固定バケットと可動フレームの組み合わせ, 可動フレームは、パレットを 1 サイクルで 1 ピッチ水平に移動できます。. フレームの動きは、ラックとピニオン装置を介してモーターによって駆動されます. 開始位置と停止位置は、高感度スイッチによって制御されます.
主なパラメータ:
原動力: 7.5kw
移動速度: 0.47MS
Pos.12 パレットホッパー
パレットの保管に使用します. 高感度の電気スイッチを使用して、パレットの位置と数量を制御します.
主なパラメータ:
保管数量: 4 個/パレット (鋼)
Pos.13 パレット回収ホッパー
パレット収集ホッパーは、生産開始時にブロック製造機にパレットを供給するために使用されます, ブロック製造機の空のパレットを供給するための下部装置が作動していないとき. それのもう一つの目的は、生産の過程で, フォークリフトがそれを取り除くために空のパレットを積み重ねるために使用されます.
Pos.14 スラットコンベア

立方体ブロックの運搬・保管用です。. ブロックはこの装置からフォークリフトで取り出され、外部へ搬送されます. コンベアのキャリアは、スチール製の金属バテンです. コンベアシステムはモーターで駆動され、固定ピッチに従って移動します. 高感度グレーティング装置による制御, それは伝えることができます
パレットとブロックを
正確に設計された位置.
主なパラメータ:
原動力: 7.5kw
長さ: 11メートル
移動速度: 0.18MS
Pos.15 プロダクト パレット マガジン
パレットを保管し、スラットコンベヤーに供給して、オートキューバーのニーズを満たすために使用されます. 3 方向に伸びたスラットにより、新しいパレットの位置が正確に決まります. 同期的にリンクされたホールムにより、パレットがマガジン内で垂直に上下に配置されるようになります. 油圧および空気圧制御システムが使用されています.
Pos.16 高架
Pos.17 混合およびバッチ処理プラント (ベース用)
Pos.17.1 骨材ホッパー (ベース用)

三人 (3) 砂と石の貯蔵には、それぞれ20m3の容量を持つ骨材ホッパーが使用されます. ステーショナリーフレームとストアホッパーで構成されています.
ステーショナリー フレームは、ホッパーを支持し、計量システムとコンクリート ベルト コンベアを固定するために使用されます。.
ホッパーは網状の鉄骨フレームで強度・剛性をアップ. 各ホッパーに骨材を積み降ろすための出口が 2 つあります。. ホッパーの出口は空気圧シリンダーによって駆動され、迅速または低速のバッチ処理を実現できます, 精度と速度を上げる. 細骨材を貯蔵するホッパー内に振動装置あり, 骨材の積み降ろしをスムーズに.
Pos.17.2 計量ベルト
計量ベルトは、ロード セル センサーで骨材を測定し、バッチ処理します. ベルトコンベアはフレームで構成されています, サポートローラー, サイドローラー, 駆動ドラムと従動ドラム, 清算装置, ゴム製コンベヤー ベルト.
主なパラメータ:
はかりの最大容量: 3000kg
動重量の精度: ±2%
モーター: 4.5kw
有効コンベヤ数量: 300トン/時
Pos.17.3 骨材スキップホイスター (基礎コンクリート用)
バッチ処理された骨材をミキサーに輸送するために使用されます. ウインドラスで構成されています, リフティングホッパー, ホッパーを持ち上げるためのレール. 限られたスイッチは、開始と停止を任意の位置で制御できます.
主なパラメータ:
ホッパー: 3480L
ドリブンモーター: 18.5kw
Pos.17.4 JN2000 ミキサー (基礎コンクリート用)

先進のプラネタリーミキサーです. キャラクターは、主軸に沿って回転するだけでなく、その軸に沿って回転することもできる 2 本の腕です。. 混合は均一かつ高速です.
主なパラメータ:
モデル: JN2000
力: 75kw
積載能力: 3000L
バッチごとの圧縮コンクリート: 2000L
Pos.17.5 セメントはかり (ベース用)
セメント計量スケールは、セメントのバッチ処理に使用されます. ミキサーの上に固定されています, バッチホッパーと 3 ロードセル. 主要部品はイタリーミックス社のSVAシリーズとRAPシリーズの製品. バッチングホッパーは、スクリュー用プログラム制御装置によって制御されます. 材料を正確に供給できます.
主なパラメータ:
最大計量能力: 1000kg (ベース用)
計量精度: ±2%
Pos.17.6 ミキサー プラットフォーム
ミキサーのサポート.
Pos.17.7 ベース コンクリート コンベア ベルト
ミキサーからブロックマシンの貯蔵ホッパーへのベース混合コンクリートの輸送用.
主なパラメータ:
ドリブンモーター: 5.5kw
有効コンベヤ数量: 360t/h
Pos.17.8 水量測定と水分測定
ベースミキサーにマイクロ波によるハイドロニクス水分測定機能を搭載, ベースミキサー内のマイクロ波センサー1個. 1 つのマイクロウォーターポンプを使用して、ミキサーに水を計量します。. 制御コンピュータは、ベースミキサーの水量と水分を完全自動で制御します。.
Pos.17.9 2 つのセメントサイロ (お客様が現地で作る)
収集灰装置を備えたセメントサイロには、レベルインジケーターとガス破壊装置が装備されています. 2つのサイロがあります, それらの容量は 80-100 トン. 2つのサイロの中で, 上部に雷回避装置を備えたものが少なくとも 1 つあります。.
Pos.17.10 2 個のセメントねじ (ベースミキサー用)
スクリューはセメントをサイロからセメント計量ホッパーに運びます. 長さは約 8 メートル.
主なパラメータ:
搬送能力: 20-25トン/時
モーター: 7.5kw
Pos.17.11 給水システム
混合システムに水源を提供する, 顧客によって構築されます.
Pos.18 混合およびバッチ処理プラント (顔用) (オプション)

Pos.18.1 骨材ホッパー (顔用)
12m3の容量を持つ1つの骨材ホッパー, 主に細かい砂の保管に使用. 独立した2つの排出口を持つ鋼板溶接構造, ドアの開閉はシリンダー駆動. バッチ処理および計量時に、高速および低速のバッチ処理を実現できます, バッチ処理の精度と速度を向上させます. 細骨材を貯蔵するホッパーには振動装置が装備されており、混合時の材料の流れをスムーズにします。.
Pos.18.2 計量ベルト (顔用)
計量ベルトは、ロード セル センサーで骨材を測定し、バッチ処理します. ベルトコンベアはフレームで構成されています, サポートローラー, サイドローラー, 駆動ドラムと従動ドラム, 清算装置, ゴム製コンベヤー ベルト.
主なパラメータ:
はかりの最大容量: 1000kg
動重量の精度: ±2%
モーター:3kw
有効コンベヤ数量: 300トン/時
Pos.18.3 骨材スキップホイスター (面コンクリート用)
バッチ処理された骨材をミキサーに輸送するために使用されます. ウインドラスで構成されています, リフティングホッパー, ホッパーを持ち上げるためのレール. 限られたスイッチは、開始と停止を任意の位置で制御できます.
主なパラメータ:
ホッパー:580L
ドリブンモーター: 5.5kw
Pos.18.4 プラネタリーミキサー (顔用JN330)
先進のプラネタリーミキサーです. キャラクターは、主軸に沿って回転するだけでなく、その軸に沿って回転することもできる 2 本の腕です。. 混合は均一かつ高速です.
主なパラメータ:
モデル: JN330
力: 7.5kw
積載能力: 500L
バッチごとの圧縮コンクリート: 330L
Pos.18.5 ウェットコンクリートコンベアベルト
混合骨材をブロック機のホッパーに搬送するベルトです。. 支持フレームを含む.
主なパラメータ:
ドリブンモーター: 5.5kw
有効コンベヤ数量: 300t/h
Pos.18.6 セメント計量スケール (顔用)
セメント計量スケールは、セメントのバッチ処理に使用されます. ミキサーの上に固定されています, バッチホッパーと 3 ロードセル. 主要部品はイタリーミックス社のSVAシリーズとRAPシリーズの製品. バッチングホッパーは、スクリュー用プログラム制御装置によって制御されます. 材料を正確に供給できます.
主なパラメータ:
最大計量能力: 300kg (顔用)
計量精度: ±2%
Pos.18.7 水量測定と水分測定
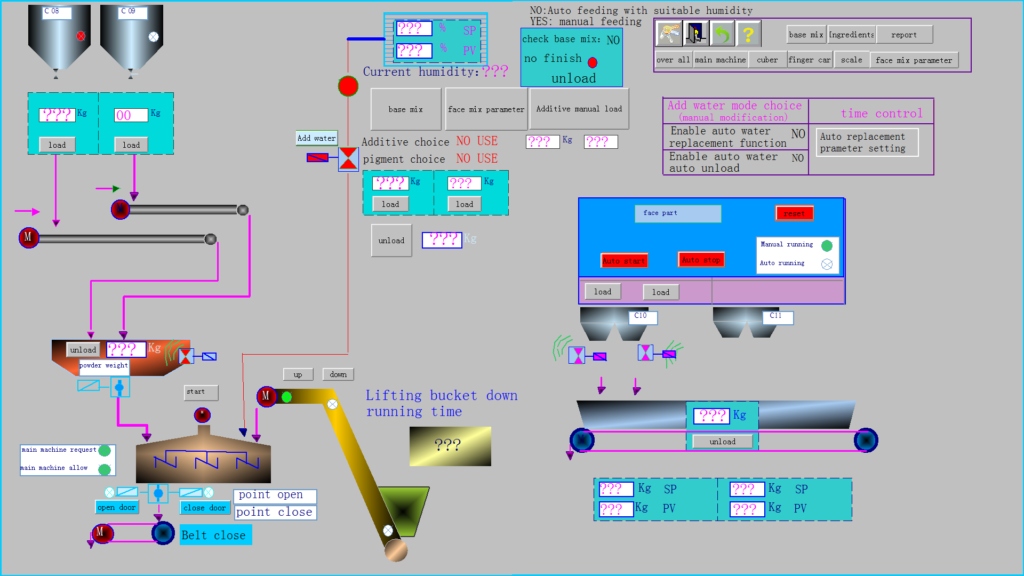
フェイスミキサーにマイクロ波による水分測定機能「ハイドロニクス」を搭載, フェイスミキサー内のマイクロ波センサー1個. マイクロウォーターポンプ 1 台を使用して、水を計量してフェイスミキサーに入れます。. 制御コンピュータは、全自動でフェイスミキサーの水量と水分を制御します。.
Pos.18.8 セメントサイロ (お客様が現地で作る)
灰回収装置付き60tサイロ1基にレベルインジケーター、ガスブレーキを装備. 頭頂部に雷回避装置あり.
Pos.18.9 One セメントネジ
スクリューはセメントをサイロからセメント計量ホッパーに運びます. 長さは約 8 メートル.
主なパラメータ:
搬送能力: 20-25トン/時
モーター: 7.5kw
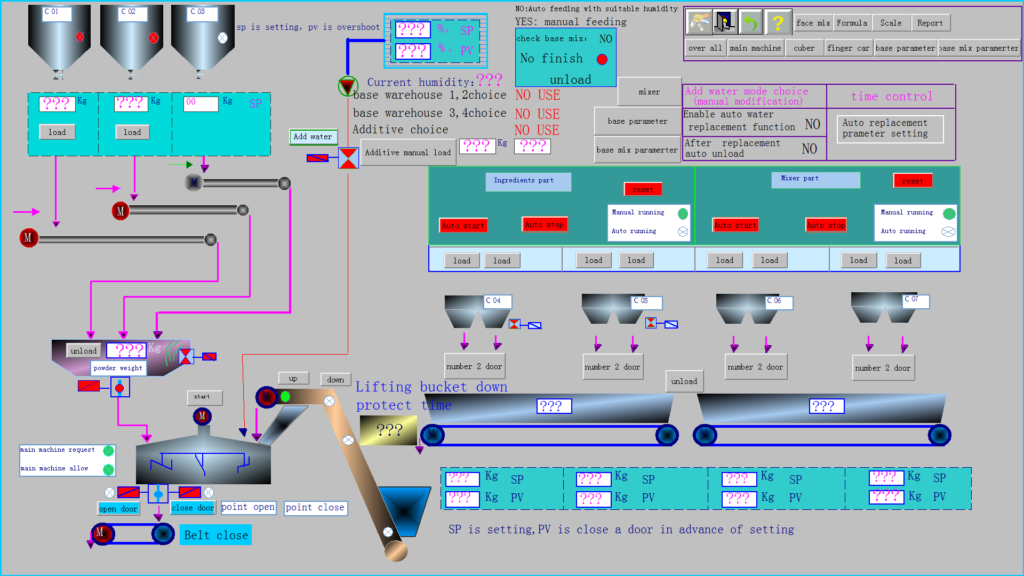
Pos.19 インテリジェント制御管理システム(ICMS)
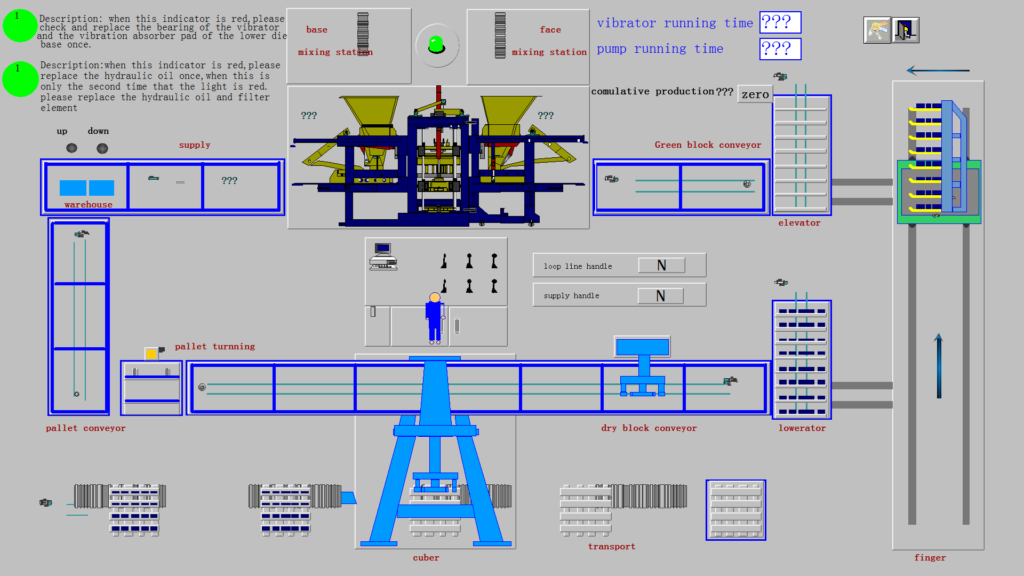
電気制御グループには、ハードウェア部分とソフトウェア部分が含まれます.
ハードウェア部分には電気制御キャビネットが含まれています, コンソール, パソコン, PLC, リモート通信モジュール, センサーなど. コンポーネントは主に国際的に有名なブランドのものです, そのような: Siemens の中央コントローラ PLC, 東芝のインバーター, シュナイダー製の操作ボタンとジョイスティック, ドイツ語 Bedook のリミット スイッチ, 水分計 (材料の湿度を正確に測定する精密技術の保証を提供します) イギリスのハイドロニクスから, 日本のオムロンのエンコーダ. PC が制御設定ソフトウェアを使用している. ホストシステムにはフレンドインターフェースがあります, データの入力と出力, グラフィック表示機能. オペレーターはいつでも簡単かつ迅速にパラメータを設定し、生産ライン全体の稼働状態を把握できます. このシステムでは英語の操作インターフェースも利用できます.
ソフトウェア部分には以下の機能が含まれます:
1) 知能計算機能モジュール
このモジュールは、主に判断とアクションのロジック機能の実装を実現します. 例えば: 電磁石の作用, 原料の処方加工と素材の水分保証, 等. インテリジェントな操作機能モジュールにより、実行デバイスアクションを正確かつ効率的に調整できます, 技術プロセスの要求に応じて, 保存運用の目的を達成するため. システム全体には、より多くの知恵の超エネルギー効果があります.
2) クラウドネットワーク通信機能モジュール
このモジュールは、主に通信の分散 I/O 問題を調整します。, リモート画面とデバッグ機能. さまざまな機能分野で使用される機器の製造により、機器の安全な動作と高効率を確保できます. 混合プラントの材料比率をリアルタイムで記録, ドライウェット度と走行状態; また、フィンガーカーの軌跡とステータス、イノベーション製品のメンテナンスステータスをリアルタイムで記録することもできます; リモート処理の問題を支援する, ダウンタイムを短縮, 機器の使用率を改善する; 標準プロジェクトの場合, エンジニアは、リモートデバッグによって自宅でマシンをインストールできます, サイクル内のシーンを短縮し、事前に本番環境に移行する.
3) 故障診断およびフォールトトレランス・補正機能モジュール
この制御システムにはプログラム操作が含まれます, 耐障害性とエラー訂正機能の実行. この機能により、誤った操作による機器の損傷や怪我による損傷を効果的に回避し、オペレータに必要な調整を行うようタイムリーに通知できます。, 到達すること “バカ” オペレーティングシステムの. オペレーターの知識レベルの要件を大幅に削減, 人為的コストの節約.
4) クラウド管理モジュール
このモジュール機能は、現在のインダストリアル 4.0 と組み合わされています。, インターネットを利用してクラウド管理工場を実現. 所有者はデータレポートのネットワークを通じていつでもどこでも工場を見ることができます, レポートに従って、すべての工場を管理し、データを調整して、リソースの使用率を最大化し、最適化の効率を達成できます。.
5) クラウド診断機能モジュール
このモジュール機能には、ローカルおよびリモート診断機能が含まれています. リモートネットワークの助けを借りて内部アラートコードを制御することにより、問題の特定の理由を迅速かつ正確に診断できます, および対応する治療方法, 本当に達成するもの “ゼロタイム” 除外する, この問題を解決するために.
6) インテリジェント管理システム
このシステムは、ユーザーに管理機能を提供します. 生産データと処方の数十の製品を保存できます, デバッグ時間後の変換製品を短縮するため, 各シフトを自動的に記録する, 生産計画の準備と生産統計を容易にするための月間生産. これらすべてのデータは、要件に応じてマネージャーに送信できます.
インテリジェント制御管理システムを利用する場合, 運用担当者の必要性が少ない, 中央制御室で完全に機器のすべての操作を完了することができます, 自動状態で無人レベルに到達; 高い信頼性, 高性能センサーにより、混合材料の水分と均一性の精度が保証されます; モーター速度制御の周波数制御による, 製品の外観を確保するために, 強度と高度な一貫性; 厳格な制御プログラムにより、機器が安定して動作します, 機器の寿命を延ばす. Bluetooth 技術の使用により、フィンガーカーケーブルの敷設がより簡単になります, メンテナンスが容易. 産業用ネットワークの使用により、制御がより近代的かつ効率的になります. 現在、この制御システムは国内外で上位のシステムとして評価されています。.
電気制御グループには、次のサブシステムが含まれます:
1. ブロックマシン制御サブシステム
2. 輸送制御サブシステム
3. オートキューブ制御サブシステム
4. フィンガーカー制御サブシステム
5. 混合およびバッチ制御サブシステム
これらの制御サブシステムは 1 つに統合され、デジタル論理制御システムによってライン全体を制御するだけでなく、すべてのシステムを独立して制御するために中央室で操作されます。. システムは安全のために相互にリンクおよびロックできます.
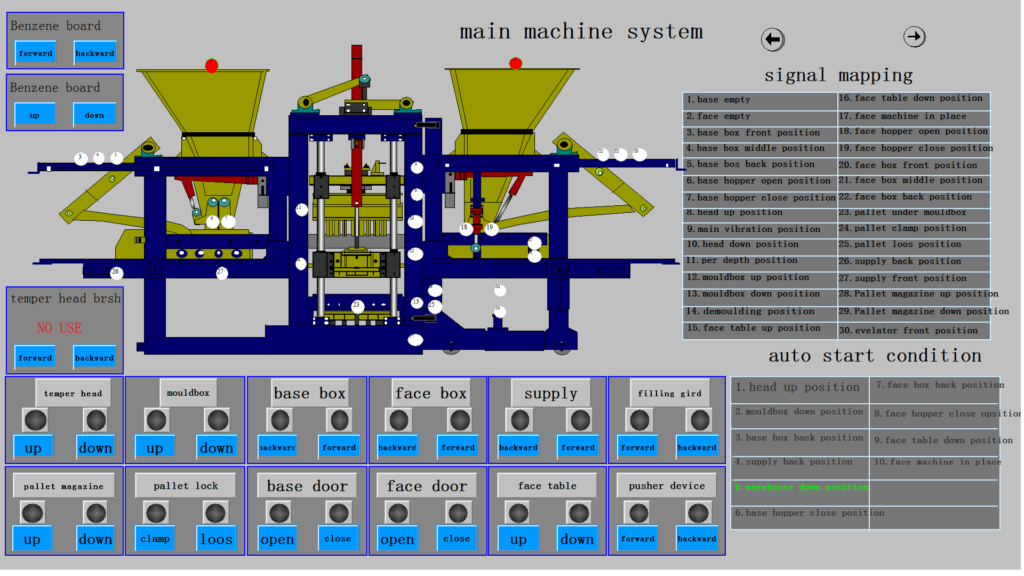
Pos.19.1 ブロック機械制御サブシステム
位置を参照する. 1
Pos.19.2 輸送制御サブシステム
の制御のために: グリーンブロックベルトコンベア, ブラシを回転, チェーンエレベーター, チェーンロワレーター, ドライブロックコンベア, パレットクリーニングブラシ, パレット回転装置, パレットクロス搬送装置, パレットホッパーとパレット給油装置,パレットスクレーパー.
Pos.19.3 オートキューブ制御サブシステム
キューバー, スラットコンベアと製品パレットマガジンを含む, Siemens Siematic S7 PLC によって制御されます. コントロール デスクには、機械の手動操作用のジョイスティックと、データの入出力およびエラー診断システム用の Siemens デジタル ディスプレイが含まれています。.
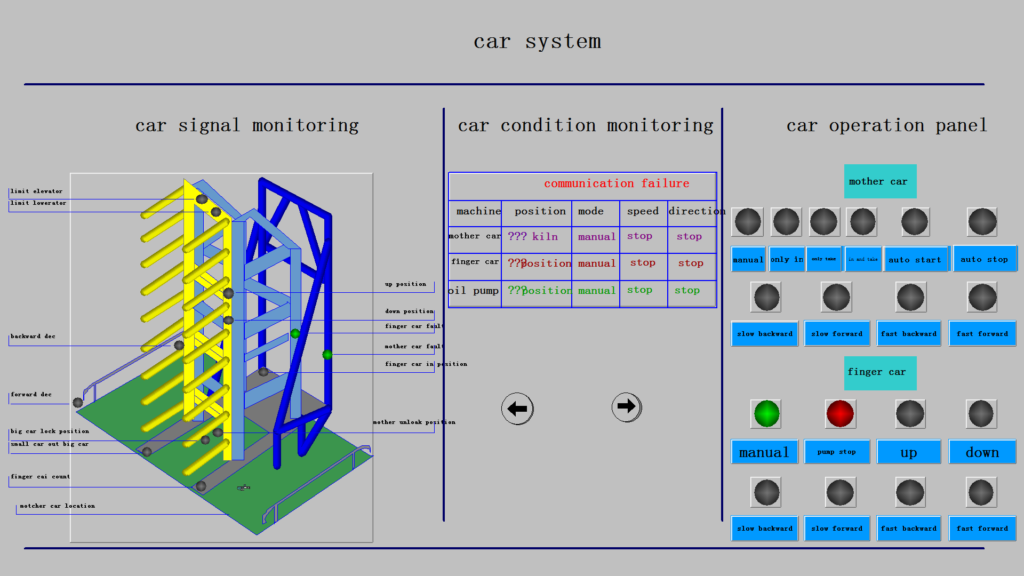
Pos.19.4 フィンガーカー制御サブシステム
シーメンス Siematic S7 PLC と電源ユニットは、機械の手動操作用のジョイスティックとデータ用のシーメンス デジタル ディスプレイを含むコントロール デスクに統合されています。- および出力ならびにエラー診断システム.
Pos.19.5 混合およびバッチ制御サブシステム
Pos.19.5.1 ベースコンクリートの混合とバッチ処理の制御
ベースコンクリートのバッチ処理と計量を自動的に制御, 水分測定と水分測定, ブロックマシンへの混合と輸送. ブロックマシンの生産頻度に応じて、関連するパラメータをコントロールユニットに入力できます。, バッチングおよびミキシングシステムは供給できます, ミックス, 水道メーター, 水分測定, 骨材をブロックマシンのホッパーに運ぶ. 輸送は自動および手動でも制御されます. データの統計と保存はコンピュータで実現できます, たくさんの公式を覚えられる.
位置. 19.5.2 面コンクリート混合用自動制御装置(オプション)
Pos.20.5.1と同じ
位置. 19.5.3 特別な機能と利点
1. 「ワンタッチでリセット」
アドバンテージ: まず、, 便利に操作できるため、オペレーターの専門知識の必要性が軽減されます. 第二に, 新しいシステムには障害の理由が表示されます. 第三に, フォールトトレラント機能により、マシンはセルフチェックと起動が可能になります.
2. インターネットによるサービス
アドバンテージ: まず、, 機械への影響を排除, したがって、機器の耐用年数を延ばします. 第二に, アップグレードにより、マシンの動作がよりスムーズになります. 第三に, 成形サイクルを短縮し、合格率を高めます. 概して, 原材料のコストを削減し、メンテナンスコストを削減できます.
Pos.20 空気圧グループ
空気圧グループは、バッチ処理および混合プラントを備えた関連機器の作用装置です, ブロック機, パレットフィーダー, パレット回転装置およびパレット給油装置. グループには、空気圧縮機が含まれます, パイプまたはホース, フィルター, シリンダー, バルブなど.

3.容量表




追加情報
| パレットサイズ | 1400 ×1150×16mm(スチール) |
|---|---|
| 容量/パレットあたり | 15 中空ブロック400×200×200mm |
| 機械の寸法 | 7800×2800×3600(4000)んん |
| オペレーションサイクル | 15-30s (製品によって異なります) |